تمام حقوق برای خط مهندسی محفوظ است
علم رباتیک علمی نوظهور و پرطرفدار است. این شاخه از علم کاربردهای مختلفی در دنیای امروز دارد. از صنعت گرفته تا پزشکی و حتی بازی و سرگرمی، این دستگاههای شگفتانگیز روز به روز قلمرو بیشتری در کمک به تامین نیازهای بشر به خود اختصاص میدهند. یکی از پرطرفدارترین زمینههای رباتیک، مسابقات آن میباشد. رباتهای تعقیب کنندهی خط، رباتهای فوتبالیست، رباتهای جنگجو و… . در این مقاله قصد داریم چگونگی ساخت یک روبات جنگجو را، مرحله به مرحله، بررسی کنیم.
قدم اول: انتخاب سایز
روبات های جنگجو در اندازه ها و وزن های مختلف ساخته می شوند. طیف وزنی روبات های جنگجو از ۷۵ گرم تا ۱۵۰کیلوگرم گستردگی دارد. هر اندازه دارای مزایا و معایب خاص خود است. برای انتخاب وزن باید ابتدا شرایط مسابقات و دسته های وزنی در نظر گرفته شود.
اندازه ی روبات عامل بسیار تاثیرگذاری در افزایش یا کاهش هزینه ی ساخت می باشد اما الزاما روبات های بزرگ گران و روبات های کوچک، ارزان قیمت نیستند. ممکن است یک روبات جنگجوی بزرگ با قطعات دست دوم و ارزان قیمت ساخته شود اما یک روبات کوچک با قطعات گران هزینه ای سنگین به سازنده ی خود تحمیل کند.
درحال حاضر تمایل به ساخت روبات های جنگجوی کوچک به دلیل تعداد بالای مسابقات برای این دسته بیشتر است؛ اما دسته ی روبات های سنگین وزن نیز جذابیت خاص خودرا برای تماشا دارد. همچنین قطعات اضافی برای روبات های بزرگ راحت تر پیدا می شوند و ایجاد تغییرات و تعمیر آن ها نیز راحت تر است.شایان ذکر است بعضی از قطعات با کاهش اندازه گران تر خواهند شد؛ بنابراین کوچکتر الزاما مترادف کاهش قیمت نیست.
دسته های وزنی روبات های جنگجو:
• ۷۵g- Fleaweight
• ۱۵۰g- Fairyweight (UK – Antweight)
• ۱ pound (454 g) – Antweight
• ۱ kilogram (2.2 lbs) Kilobot
• ۳ pound (1.36 kg) – Beetleweight
• ۶ pound (2.72 kg) – Mantisweight
• ۱۲ pound (5.44 kg) – Hobbyweight
• ۱۵ pound (6.80 kg) – BotsIQ Mini class
• ۳۰ pound (14 kg) – Featherweight
• ۶۰ pound (27 kg) – Lightweight
• ۱۲۰ pound (54 kg) – Middleweight
• ۲۲۰ pound (100 kg) – Heavyweight
• ۳۴۰ pound (154 kg) Super Heavyweight
قدم دوم: تکمیل تحقیقات و تعیین بودجه
یکی از بهترین منابع تحقیق، تجربیات موجود در زمینه ی روباتیک و به خصوص روبات های جنگجو می باشد. سایت http://www.buildersdb.com این امکان را به شما می دهد. این سایت توسط اکثر مسابقات جهانی به عنوان مرکز ثبت ساخته ها معتبر شناخته شده است. هر تیم موظف است پروفایلی به انضمام عکس بات برای خود بسازد. تجربیات موجود برای نزدیک تر شدن طرح های ذهنی به واقعیت و تشکیل یک نقشه ی راه مفید است.
اهمیت وجود یک نقشه ی راه که با واقعیت مطابق باشد ناظر به این مسئله است که ساخت روبات به راحتی می تواند هزینه ی هنگفتی روی دست شما بگذارد؛ از همین رو نیاز است تا قطعات مورد نیاز و مراحل ساخت در ابتدای کار پیش بینی شده هزینه ی متناظر با هرکدام مشخص شود. همچنین نباید از انعطاف پذیری این نقشه غافل بود زیرا همواره همه چیز طبق نقشه پیش نخواهد رفت. در همین راستا می توان به احتمال شکستن قطعات در طول ساخت یا درحین مسابقه و لزوم برخورداری از قطعات یدکی اشاره کرد.
قطعاتی که عموما در ساخت روبات جنگ جو به کار می روند:
• موتور راننده/انتقال
• چرخ
• شاسی
• موتور اسلحه
• کنترل سرعت برای هر موتور
• سیستم کنترل از راه دور (فرستنده و گیرنده)
• باتری
• سیم
• سویچ اصلی قدرت (main power switch)
• یاتاقان
• شَفت
• محور
• پیچ و بست
• مواد لازم برای زره
• سلاح (مواد لازم یا اسلحه ی خریداری شده)
قدم سوم: طرح اولیه
یکی از مهم ترین مراحل در هرگونه فرایند ساخت، طرح اولیه می باشد. طراحی فقط شامل شکل و زیبایی روبات نمی شود و تاثیر چشم-گیری بر عملکرد آن خواهد داشت. به طور مثال دسترسی راحت به بخش هایی که احتمال خرابی آن ها بیشتر است(با توجه به نقشه ی راه) از نکات مهم طراحی است. اگر برای تعویض باتری لازم شود کل ساختار را به هم بریزیم، روبات ما از ضعف طراحی رنج می برد.
تناسب طراحی با دسته ی وزنی روبات نیر مهم است. از این طریق می توان یک تخمین کلی نسبت به شکل روبات-هایی که قرار است رقیب باشند به دست آورد. فیلم های موجود از مبارزه های قبلی نیز می تواند به ما در بهینه کردن طراحی کمک کند. استفاده از نکاتی که در طراحی روبات های موفق به کار رفته و درس گرفتن از اشتباهات بازنده ها از فواید زیر نظر گرفتن مسابقات قبلی می باشد. سوای همه ی این موارد، برای نهایی کردن طراحی باید قوانین مسابقات مورد نظر را نیز مرور کرد.
قدم چهارم: انتخاب قطعات
رباتها از ترکیب قطعات خریداری شده و دستساز بهوجود میآیند. اتخاذ تصمیمات درست در این مرحله به شدت حیاتی بوده و قادر است هزینههای پروژه را کاهش دهد. بدیهی است که عکس این قضیه نیز صادق است. در زیر به تشریح قطعات اصلی روبات جنگجو میپردازیم.
موتور
نیروی رانندهی پشت هر روبات را فراهم میکنند. موتور در روبات جنگجو از نوع جریان مستقیم بوده و دارای ولتاژی بین ۳ تا ۷۲ میباشد. برای انتخاب موتور مناسب نیاز است تا هماهنگی ولتاژ آن با باقی قطعات را در نظر بگیرید. همچنین وزن و اندازهی این قطعه نباید روبات را سنگین کند. در سمت مقابل توجه به سبکی روبات نباید باعث انتخاب موتوری ضعیف و کاهش کارایی شود. سرعت/گشتاور موتور نیز معیاری دیگر برای ارزیابی بین گزینههای مختلف است.
برای روباتهای سبک وزن میتوان با استفاده از یک دستگاه دریل، موتور ساخت. برای این کار، کافی است یک دریل خریداری کرده و محتویات داخل بدنه را از آن جدا کنید. گفتنی است ارزانترین نوع دریل هم میتواند به عنوان موتور به کار گرفته شودو به شرط آن که تناسب لازم را با بقیهی قطعات داشته باشد.

با دیدن کردن از سایتفروشگاه تخصصی ECA میتوانید قطعاتی آمادهبهکار برای روبات خود پیدا کنید. قطعاتی همچون موتور، میکروکنترلر، چرخ و سایر قطعات لازم برای ساخت یک روبات جنگجو. این سایت همچنین روباتهای پیش ساختهای را نیز به فروش گذاشته است.
چرخ
جدا از بحث تناسب اندازهی چرخ با سایر قطعات و سد نشدن راه عملکرد توسط این قطعه، مهمترین مقوله در این ارتباط، انتخاب بین محور زنده و مرده میباشد. محور زنده انرژی الکتریکی را خود به چرخها منتقل میکند اما محور مرده صرفا وظیفهی اتصال چرخ ها به بدنه و به یکدیگر را بر عهده دارد و انتقال نیرو از راه کمربندی متصل به خود چرخ صورت میگیرد.
بحث دیگر در زمینهی انتخاب چرخ، جنس روکش و تاثیر آن بر حرکت روی سطح زمین مسابقه است. سخت بودن و پیچیدگی این مسائل باعث شده چرخهای آماده به کار در بین سازندگان روباتهای جنگجو محبوب باشند. در ایران پیدا کردن قطعات درجه یک جهانی دشوار است اما وبسایت دانشجو کیت ، گزینههای متنوعی را در این زمینه پیش رویتان خواهد گذاشت.
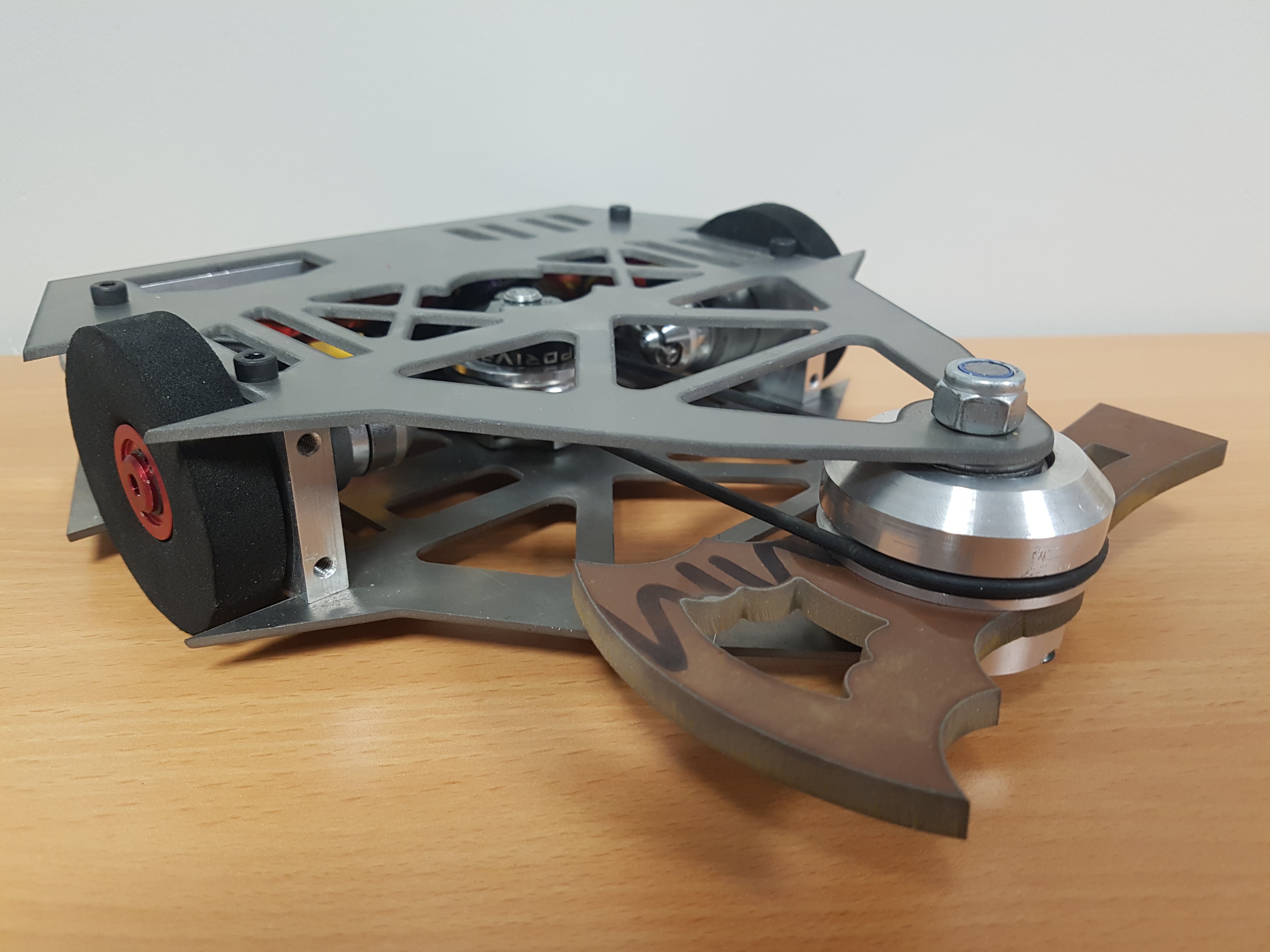
بدنه
بدنهی روبات جنگجو را از مواد اولیه مختلفی میتوان ساخت. آلومینیوم به دلیل سبکی و در دسترس بودن یکی از محبوبترین مواد اولیهی مورد استفاده در بدنهی این نوع از روباتهاست. آلومینیوم آلیاژهای مختلفی دارد که معمولا از دو آلیاژ ۶۰۶۱-T6 و ۷۰۷۵ در ساخت روبات جنگجو استفاده میشود. اولی سبک است و مقاومت کمی دارد برای همین بیشتر در قطعات داخلی و بخشهایی که از محل وارد شدن ضربات دورترند، مورد استفاده قرار میگیرد و دومی به دلیل مقاومت بالا، بیشتر رای ساخت قطعات بیرونی روبات، به کار گرفته میشود. از دیگر مواد مورد استفاده میتوان به UHMW (پلاستیک پایدار)، پلیکربنات (که در تحمل ضربه از فلزات بهتر عمل میکند) و تیتانیوم (که گران است اما برای ساخت سلاحی مرگبار به کار خواهد آمد) اشاره کرد.
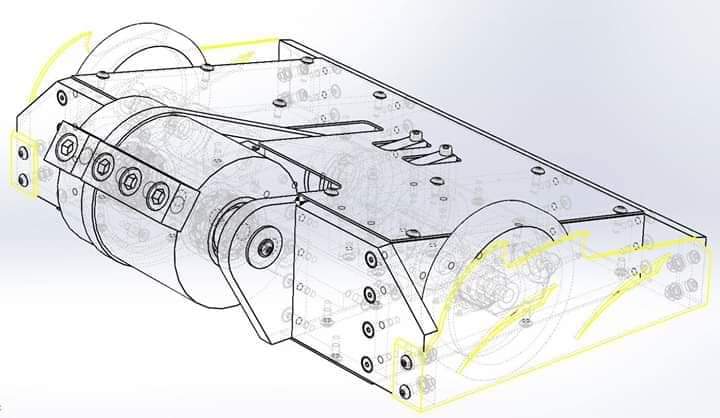
قدم پنجم: طراحی سه بعدی

بهتر است قبل از شروع کار با قطعات اصلی و اتصال آنها به یکدیگر، طرح خود را با نرمافزارهایی همچون solid work و یا autodesk inventor بیازماییم. این نرمافزارها رابط کاربری دوستانهای داشته و برای یادگیری چندان چالش برانگیز نیستند. اگرچه برای داشتن نسخهی اصلی نیاز است صاحب یک ایمیل با پسوند .edu بوده یا از طریق یک کمپانی اقدام کرده باشیم. قطعات مختلف در دیتابیس این دو نرمافزار موجود می باشد. همچنین مدلهای آمادهی روبات ها برای یادگیری و بررسی در دسترس کاربران قرار گرفته است. نسخهی سبک (ویژهی دانشآموزان) از نرمافزار solid work را میتوانید از این لینک دریافت کنید:
به انجام رساندن این مرحله، ریسک کار با قطعات اصلی و افزایش هزینههارا کاهش میدهد؛ اما شما میتوانید این ریسک را پذیرفته و به مرحلهی بعد بروید. در صورتی که عدم وجود توانایی کار با نرمافزارها دلیل گذشتن شما از این مرحله است، پیشنهاد ما ساختن ماکت کاغذی میباشد. برای دیدن نمونههای ماکت میتوانید از http://revision3.com/systm/robots دیدن کنید.
قدم ششم: ساخت قطعات
از آنجا که اکثر سازندگان روباتهای جنگجو بودجهی محدودی دارند، قطعات از پیش ساخته شده همواره قابل اتکا نیست. همچنین این قطعات مخصوص ربات خاصی نیستند و ممکن است با باقی قطعات نامتناسب باشند بنابرین از ساختن بعضی قطعات گریزی نیست. برای این کار راههای مختلفی وجود دارد اما مهمترین مقوله رعایت نکات ایمنی و برخورداری از نظارت افراد خبره است. زیرا بعضی از قطعات روباتهای جنگجو بسیار خطرناکند و برای کار با آنها در هر مرحلهای باید به دستورالعملی ویژه آگاه بود.
یکی از جاهایی که طراحی سهبعدی به کار میآید همین مرحله است. کافی است روبات خود را به صورت سهبعدی طراحی کرده و سپس طرح قطعات لازم برای ساخت را در مقیاس واقعی پرینت بگیرید و سپس با توجه به دستورالعملها اقدام به برش دادن فلز یا بافت فیبر کربنی کنید. برای کمک گرفتن در استاندارد سازی قطعهی خود میتوانید به سازندههای استاندارد قطعه نیز مراجعه کنید.
قدم هفتم: اتصال قطعات به یکدیگر
در این مرحله شاید نیاز باشد اصلاحاتی را در قطعات دستساز به وجود آورید. فراموش نکنید قطعات یدکی لازم است و برای برش دادن خیلی با احتیاط عمل کنید. چون اضافات را میتوان کاست اما اگر قطعهای از حد لازم کوچکتر شود، راه برگشتی نخواهیم داشت.
قدم هشتم: سیم کشی و تنظیم کنترلها
کنترل یکی از اجزای اصلی روباتهای جنگجو میباشد. در واقع بدون کنترل، تمام کارهای انجام شده بیمعنی میشود. کنترل روبات جنگجو از دوطریق انجام میگردد: مینیکامپیوتر و کنترل رادیویی که دومی محبوبتر و مورداستفادهتر است.
در گیرندهی کنترل رادیویی (کنترل از راه دور)، خروجیهای مختلفی داریم. هرکدام از این خروجی ها به یک کنترل سرعت متصل است. این گونه از روباتها دارای موتورهای مختلفی میباشند که ممکن نیست همه باهم کنترل شوند. هر موتور از طریق سیم به کنترل سرعت خود متصل است و از کنترل سرعت به منبع نیرو وصل میشود. وظیفهی کنترل سرعت این است که در هر لحظه ولتاژ مورد نیاز هرکدام از موتورها را فراهم نماید.

قیمت گذاری کنترل سرعتها بر اساس آمپر قابل تحملشان میباشد. برای انتخاب کنترل باید بسیار با دقت عمل کرد زیرا هرکدام از آنها با ولتاژ و جریانی خاص کار میکنند. از این لحاظ لازم است تناسب آن با دیگر قطعات بررسی شود. انواع کنترلها عبارتند از PPM، PCM، ۲.۴ GHZ، ۸۰۰ MHZ و ۸۰۲.۱۱ که هرکدام مناسب کاربری خاص و کارایی متفاوتی میباشند.
نوع باتری باتوجه به اندازهی روبات تعیین میشود. باتریهای LiPoly معمولا برای روباتهای کوچک مورد استفاده قرار میگیرند و به عمر بالا در عین سبکی معروفند. قیمت آنها با وجود سیر نزولی در سالهای اخیر همچنان در صدر لیست قیمتها قرار دارد. روباتهایی که از لحاظ وزنی در دستهی متوسط و سنگین قرار میگیرند از پکهای NiCad به عنوان باتری استفاده میکنند. این باتریها به ارزانقیمت بودن معروفند و مشابه باتریهای موجود در دریل میباشند. برای خریداری باتری نیز میتوانید به وبسایتهایی مانند ECA مراجعه کنید و یا از راه حلهای خلاقانه استفاده کرده خودتان باتری بسازید.
بهتر است باتری را در مراحل نهایی ساخت روبات انتخاب کنیم. زیرا مقدار نیروی الکتریکی لازم ممکن است از پیشبینی ما بیشتر باشد.
قدم نهم:تست و قلقگیری
لازم است در یک محیط امن و ترجیحا با نظارت یک متخصص روباتیک، دستگاهتان تست شود؛ اما قبل از آن، توصیه میشود زیرسیستمها را به صورت جداگانه امتحان کنید تا به سیستم اصلی برسید. نکتهی مهم بعدی، قلق گیری و جا افتادن کنترل روبات در دست میباشد. یکی از مهمترین دلایل شکست در مسابقات روباتهای جنگجو ضعف در مهارتهای رانندگی است؛ پس مراقب باشید که طراحی ظریف و خلاقانهی خود را با اجرای ضعیف، به نابودی نکشانید. مزیت دیگری که آزمودن دستگاه در یک شرایط امن و آزمایشگاهی دارد، جا افتادن قطعات کنار هم و به اصطلاح «گرم شدن» سیستم میباشد.
عالی بود
شما درست کردید؟؟
عالی