تمام حقوق برای خط مهندسی محفوظ است

کلمهی عمود پرواز را شاید بارها و بارها در اخبار و رسانهها شنیده باشید؛ این اختراعات که ابتدا برای مقاصد نظامی اختراع شدند، این روزها به عنوان پیک موتوری آمازون کار میکنند. در این مقاله سعی کردهایم که با بیانی نه چندان حرفهای و مبتدی اطلاعاتی راجع به پهبادها ارائه دهیم. با خط مهندسی همراه باشید.
پهپاد مخفف چه کلماتی است؟
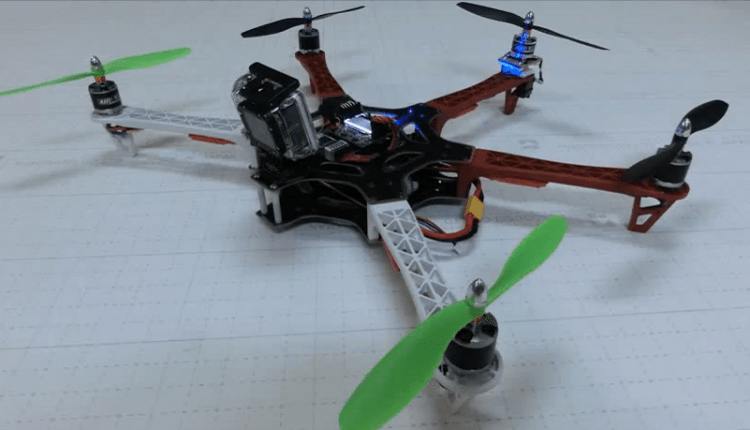
قبل از آنکه وارد بحث مولتی روتورها شویم، بد نیست کمی با پهپادها ( Drones ) آشنا شوید. کلمهی پهپاد مخفف پرنده هدایت پذیر از دور میباشد. دقت شود که این کلمه پهپاد است و نه پهباد. همانطور که از نام آن پیداست، پهپاد به وسیلهای گفته میشود که دارای قابلیت پرواز بوده و از راه دور و بدون استفاده از انسان به عنوان سرنشین قابل کنترل است. اولین پهپادها برای مقاصد نظامی و با هدف حمل بمب و تجهیزات نظامی و جلوگیری از کشته شدن خلبانان در طی جنگها طراحی و ساخته شدند. امروزه از پهپادها برای نقشهبرداری، سمپاشی زمینهای کشاورزی، تحقیقات هواشناسی و جغرافیایی و حتی امداد و نجات استفاده میشوند.

پهباد به وسیلهای گفته میشود که دارای قابلیت پرواز بوده و از راه دور و بدون استفاده از انسان به عنوان سرنشین قابل کنترل است. مولتی روتورها (Multirotor) یا مولتی کوپترها (Multicopter) نوع خاصی از پهپادها هستند که در دسته بالگردها دستهبندی شده و به عمودپرواز معروف هستند.
مولتی روتور چیست؟
مولتی روتورها (Multirotor) یا مولتی کوپترها (Multicopter) نوع خاصی از پهپادها هستند که در دسته بالگردها دستهبندی شده و به عمودپرواز معروف هستند. مولتی روتورها برای پرواز از بیش از دو موتور بهره میبرند. این روزها در ماموریتهای بسیاری از عمودپروازها استفاده میشود. دلیل این امر این است که مکانیکِ یک روتور به گونهای است که کنترل پرواز را نسبت به سایر وسایل پرنده تک موتور و دو موتور راحتتر میسازد. همچنین اگر تعداد موتورها و به تبع تعداد پرهها بیشتر باشد، تعادل پرنده در پرواز بیشتر بوده و در نتیجه کنترل آن نیز راحتتر خواهد بود.

یک مولتی روتور از چه اجزایی تشکیل شده است؟
مولتی روتورها را در محصولات رباتیکی دسته بندی میکنند. بخشهای اصلی یک مولتی روتور موارد زیر میباشند:
-
موتور:
اکثر مولتی روتورهای پیشرفته، برای حرکت از موتورهای براشلس قدرت میگیرند. این نوع موتورها بسیار کوچک، سبک و پرقدرت میباشند. عدم وجود جاروبک یا همان زغال در این نوع موتورها باعث شده که هم اصطکاک بسیار کم بوده و نیز میتوان توان و جریان بالایی را به موتور اعمال کرد.
![مولتی-روتور-09]()

-
اسپید کنترلر :
اسپید کنترلر، همان راه انداز موتور براشلس است. در موتورهای براشلس بخاطر عدم وجود جاروبک عمل کموتاسیون و تغییر قطبها و در نهایت چرخش موتور توسط اسپید کنترلر یا درایور موتور براشلس انجام میشود. اصول کلی کارکرد این قطعه به گونهایست که با تولید نوسان، برق مستقیم را به صورت متناوب در آورده و تحریک اولیه را برای حرکت موتور ایجاد میکند.
![مولتی-روتور-08]()

-
ملخ :
طول و گام ملخ دو فاکتور پر اهمیت در انتخاب ملخ است که معمولا به اینچ و به صورت پیوسته بر روی ملخ نوشته میشود. برای مثال ملخ ۶*۸ ملخی است با طول ۸ اینچ و گام ۶ اینچ. گام به میزان پیشروی ملخ در هر دور در واحد اینچ گفته میشود. البته ملخها از منظر نوع موادی که در ساخت آن به کار رفته هم به چند دسته تقسیم بندی میشوند که از ان جمله میتوان به ملخهای چوبی، پلاستیکی و مواد مرکب یا کربنی نیز اشاره کرد.
اگر با دقت در تصویر زیر مشاهده کنید، طول و گام ملخ را میتوانید ببینید.
![مولتی-روتور-02]()
-
باطری :
شاید دغدغه اصلی سازندگان وسایل پرنده الکتریکی تامین انرژی این نوع از پرنده ها است. شاید در گذشتهای نه چندان دور این امر تا حدودی غیر ممکن مینمود اما با ورود و عرضه باطریهای لیتیوم-پلیمر یا همان لیپو دنیای پرنده های الکتریکی وارد مرحله جدیدی از زندگی خویش شد. چون این باطریهای با دارا بودن وزن کم، قدرت زیاد و قدرت تخلیه جریان بسیار بالا میزان ساعت پروازی به مراتب بالاتری را به پرنده های الکتریکی میدهند.


-
شاسی یا بدنه :
از مهمترین بخشهای یک پرنده میتوان به بدنه پرنده اشاره کرد که البته در پرندههای مبتدی و مولتی روتورهایی که بیشتر کاربرد تفریحی دارند فاکتور چندان مهمی به حساب نیاید، اما در پرندههای حرفهای و نیمه حرفهای، موادی که در ساخت مولتی روتورهای اسباب بازی استفاده میشود به کار نمیآیند. در پرنده های حرفه ای تا نیمه حرفه ای اکثرا از الیاف کربن برای ساخت بدنه مولتی روتورها استفاده میشود. الیاف کربن با دارا بودن مقاومت بسیار بالا وزن بسیار کمی را به خود اختصاص میدهند. ولی در کل هرچه پرنده سبکتر باشد، انرژی کمتری برای پرواز صرف کرده و همچنین در مرحله ساخت نیز، مادهی بکار رفته تاثیر به سزایی در نوع و سرعت فرآیند ساخت میگذارد.

در برخی مولتی روتورها، قابلیت پرواز خودکار یا اتوپایلت وجود دارد که عموما برای ایجاد چنین قابلیتی از شتابسنجها، جایروها یا همان ژیروسکوپها و قطبنمای دیجیتالی، به صورت سه درجه آزادی و شش و نه و حتی دوازده درجه آزادی استفاده میشود که هر چقدر تعداد درجه های ازادی بیشتر باشد، پرنده پایدارتر و حرفه ای تر خواهد بود.
انواع مولتی روتورها
مولتی روتورها در انواع و سایزهای مختلفی طراحی و ساخته میشوند که شامل موارد زیر میباشند:
- تری کوپتر (دارای سه موتور)
- کواد روتور یا کوادکوپتر (دارای چهار موتور)
- پنتا کوپتر (دارای پنج موتور)
- هگزا کوپتر (دارای شش موتور)
- اوکتا کوپتر (دارای هشت موتور)
انواع مولتی روتورها
قبلی ۱ از ۵ بعدی







مولتی روتورها بسته به هدف و نیاز، قابل ارتقا به بیش از هشت موتور نیز میباشند. هرچه تعداد روتور در یک پرنده بیشتر شود تعادل و پایداری آن نیز بیشتر شده و البته سیستم کنترلی آن پیچیدهتر میشود.
یک مولتی روتور چگونه کار میکند؟
در پرواز یک وسیله پرنده دو مسئله حائز اهمیت است :
-
- بلند شدن و نشستن پرنده ( Take off & Landing )
- حرکت مستقیم و چرخش
یک هلی کوپتر را در نظر بگیرید. وسایل پرنده برای پرواز از ایجاد اختلاف فشار در اتمسفر پیرامون خود برای بلند شدن و حرکت در هوا استفاده مینماید. با چرخش پرههای متصل به شفت موتور به کار رفته در یک مولتی روتور، جریان آشفته در هوای اطراف پره ایجاد شده که موجب میشود فشار هوا در یک سمت پره کمتر و در سمت دیگر بیشتر شود. با چرخش ملخ بالای هلی کوپتر نیز، این اختلاف فشار در زیر و بالای پرهها ایجاد میشود که این اختلاف باعث ایجاد نیروی برآ ی هلی کوپتر شده و آن را بالا میکشد.

حال با برخورد مولکوهای هوا به این پرهها، نیروی عکس العمل در شفت پرههای هلی کوپتر ایجاد گشتاور کرده که موجب چرخیدن بدنه هلی کوپتر به دور خود میشود. برای جلوگیری از این حالت، دو راه وجود دارد:
-
- بجای یک پره از دو پره استفاده میشود که گشتاور ایجاد شده را به همان گونه خنثی کند؛ بدین ترتیب که در جهت مخالف با پره اصلی بچرخد.
- در انتهای دم هلی کوپتر یک پره قرار میدهند تا با ایجاد نیروی مقاوم در برابر هوای اطراف مانع از چرخش هلی کوپتر شود.
بدین ترتیب پرواز یک هلی کوپتر امکان پذیر میشود. حال اگر با دقت بیشتری به مسئله نگاه کنیم، به راحتی میتوانیم به مکانیزم چرخش بالگرد حول محور عمودی پی ببریم؛ با افزایش و کاهش دور چرخش هر یک از پرهها نیروی گشتاور در یک سمت بیشتر بوده و موجب چرخش هلی کوپتر در همان جهت میشود.
چگونگی حرکت خطی هلی کوپتر در امتداد محور X و Y قدری پیچیده میباشد که در این مقاله به آن نمیپردازیم.
در مولتی روتورها نیز اتفاقی مشابه میافتد؛ تنها با این تفاوت که در مولتی روتورها، چند موتور، چند شفت و چند ملخ وجود دارد و قضیه کمی متفاوت است. در مولتی روتورها باید چرخش نسبی پرهها نسبت به یکدیگر (پرههای مجاور و مقابل) در نظر گرفته شود.
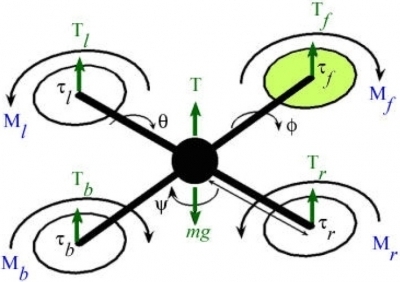
برای توضیح پرواز مولتی روتورها یک کوادکوپتر را که نسبت به سایر مولتی روتورها ساختمان سادهتری دارد در نظر بگیرید. کوادرتور از چهار ملخ که دو به دو بر خلاف جهت هم میگردند تشکیل شده است. یعنی به این صورت که دو ملخ روبروی هم به صورت همجهت به یک سمت میچرخد و دو ملخ روبروی دیگر که باز روبروی هم قرار دارند به صورت همجهت بوده و در خلاف جهت جفت ملخ اول میچرخد و این امر موجب میشود تا ملخها دو به دو اثر عکس العمل همدیگر را خنثی کرده و کوادکوپتر در تعادل قرار گیرد.
حال اگر کوادکوپتر را بر روی محورهای X و Y و ارتفاع را محور Z در نظر بگیریم، ۳ حالت حرکتی را بررسی میکنیم:
- تغییر ارتفاع (بلند شدن و نشستن پرنده) :
برای تغییر ارتفاع تنها لازم است تا همهی ملخها با دور یکسان بچرخند. در این حالت اختلاف فشار در تمام نقاط یکسان بوده و مولتی روتور در امتداد محور Z حرکت خطی خواهد داشت و به عبارت دیگر بالا و پایین میرود.
- چرخش حول محور عمود:
برای آنکه حول محور عمود چرخش ایجاد شود، لازم است تا دور جفت ملخهای یک جهت کم و به همان مقدار دور جفت ملخ جهت مخالف افزوده شود. این کار باعث میشود بدون تغییر ارتفاع نیروی عکسالعمل یک سمت از سمت دیگه بیشتر شده و در نتیجه پرنده در یک سمت حول محور عمودی بچرخد.
- چرخش حول محورهای X و Y و حرکت خطی در امتداد این محورها:
برای حرکت در امتداد X، کوادکوپتر ابتدا باید حول Y دوران کند. در این حالت، لازم است تا دو ملخی که همجهت با یکدیگر چرخیده و بر روی محور X قرار دارند نسبت به هم دارای تفاضل دور شوند. بدین ترتیب کوادکوپتر حول Y قدری چرخیده و یک طرف کوادکوپتر به سمت بالا آمده و طرف دیگر به پایین هدایت شود. حال با یکی کردن دور ملخها، پرنده به سمت ملخی که پایینتر قرار گرفته حرکت خطی انجام میدهد. همین اتفاق برای حرکت در امتداد محور Y نیز به طور مشابه میافتد.
در سایر مولتی روتورها، مکانیک حرکت و کنترل پرواز به همینگونه بوده و تمام حالتهای حرکتی به دور موتورها بستگی دارد. عوامل بسیاری همچون تغییر دور ناخواسته پره ها و عدم تعادل در سرعت چرخش پره ها، عدم تعادل وزنی پرنده و وزش باد موجب برهم خوردن تناسب و تساوی دور ملخها شده که در نهایت پرنده را واژگون میسازد.
این روزها، مولتی روتورها پای خود را در زندگی روزمره انسانها باز کرده و از تجهیزات نظامی و جنگی گرفته تا عکاسی و فیلم برداری مراسم عروسی و اسباب بازی کودکان بالای ۶ سال کاربردهای فراوانی داشته و به خوبی پاسخگوی نیازهای بشر هستند. در این مطلب سعی شد تا و با بیانی ساده و مبتدی توضیحی مختصر راجع به مولتی روتورها ارائه شود. با خط مهندسی همراه باشید تا در پستهای بعدی بهتر و تخصصیتر به بررسی مولتی روتورها بپردازیم.
سلام من یک راه حل بسیار ساده و ارزان قیمت برای دور زدن یا جرخش کواد کوپتر یا هیلو کوپتر دارم.که اصلا نیاز به این همه پیجیدگی نیست.سازندگان کواد کوبتر ایده مو میفروشم